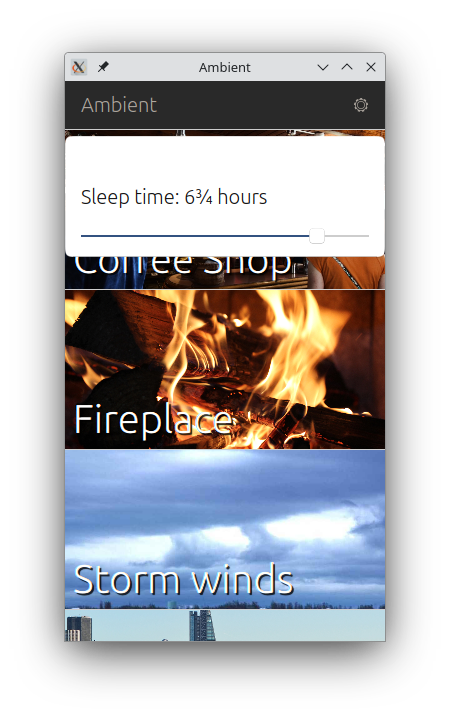
A friend of mine on Ubuntu Touch reached out to me the other day about one of the older apps that I maintain. It's called Ambient, which is a simple app that plays background noise for a set period of time. Apparently, my friend uses it every night to help …